
Un ciempiés paseaba contento
Hasta que un sapo burlón
Le dijo:¨Cuéntame, ¿en qué orden mueves las patas?
Le llenó de dudas hasta tal punto
Que cayó exhausto en el camino
Sin saber cómo correr.
¿A quién no le ha pasado lo mismo que le pasó al ciempiés? Cuando nos ponemos a analizar conscientemente alguna tarea la incertidumbre nos gana la partida. Hasta las actividades más simples pueden volverse casi imposibles. El poema del dilema del ciempiés, atribuido a Katherine Craster (1841–1874), fue popularizado por el psicólogo George Humphrey. En su libro The Story of Man’s Mind (1923) destaca que ¨Ningún hombre hábil en un oficio necesita poner atención constante en el trabajo de rutina, y si lo hace, la tarea se echará a perder¨. Precisamente la ley de Humphrey versa: la atención consciente a una tarea realizada normalmente de modo automático perjudica su desempeño.

Muchas veces se ha vinculado esta ley a lo que se denomina parálisis por análisis o sea dejar de actuar en situaciones en que tenemos que tomar decisiones importantes por un exceso de pensamientos reflexivos, recogiendo tanta información sobre el tema que el exceso de análisis complica la toma de decisión debido al esfuerzo cognitivo necesario, aunque este punto de vista generalmente esta más vinculado a la teoría de la toma de decisiones y la procrastinación.
Karl Popper (1997) también hace referencia al dilema del ciempiés, aunque en vez de un sapo el que habla es una araña. Mas allá de la fábula, el filósofo cuenta una anécdota del violinista Adolph Busch que en una ocasión al final de un concierto, un colega le preguntó cómo interpretaba un determinado pasaje. Busch dijo que era bastante sencillo y entonces se dio cuenta de que ya no era capaz de interpretarlo. El intento de interpretarlo conscientemente afectó a su digitación ya no fue capaz de hacerlo.
Para explicar esta situación utiliza el concepto del nivel de control consciente. Si una acción o una habilidad cae por debajo de ese nivel, el simple hecho de seguirla en forma consciente causa interferencia hasta detenerla por completo. El control consciente es el control más elevado, mientras que los demás controles se han sumido en el subconsciente y en el inconsciente. Sólo el control más elevado sigue siendo una acción plenamente consciente, de tal modo que sabemos lo que estamos haciendo.
Ahora bien, la cuestión es cómo se llega a esta situación, donde un experto no puede determinar las reglas de su accionar, por más sencilla que sea la tarea. Un aprendiz calcula usando reglas y hechos, pero con talento y experiencia se convierte en un experto que ve intuitivamente lo que debe hacer sin recurrir a reglas. Cuando uno le pide las reglas que está usando, se lo está haciendo retroceder al nivel de principiante; en vez de usar reglas que ya no recuerda, se ve obligado a recordar reglas que ya no usa. Ningún conjunto de reglas o hechos puede capturar el conocimiento que tiene un experto cuando ha almacenado su experiencia de resultados efectivos de decenas de miles de situaciones (Dreyfus, 1979)
Alan Turing sugirió que una computadora digital programada con reglas y hechos podría exhibir un comportamiento inteligente, así nació la inteligencia artificial a mediados del siglo pasado. En los orígenes de la denominada GOFAI (según los términos en ingles Good Old Fashioned Artificial Intelligence), los investigadores intentaron producir maquinas expertas que sigan las reglas usadas por maestros expertos. Estas máquinas aun siendo más veloces que las personas para aplicar las reglas no llegan al rendimiento de los humanos.
El principal problema es que generalmente se entiende que en el aprendizaje se parte de casos particulares y de ahí se abstraen reglas heurísticas más generales que permitan ser utilizadas en cualquier situación, pero pareciera que la adquisición de habilidades se mueve de manera contraria, de reglas abstractas a casos particulares (Dreyfus, 1987).
Cuando a un adulto aprende alguna habilidad en particular, usualmente comienza aplicando reglas fuera de contexto (teoría del procesamiento de la información). Así un principiante aprende a seguir ciertas reglas estrictas de la actividad. Sin embargo, una vez que comienza a entender las características, comienza a aspectos significativos, pero los mismos están libres de contexto. En la siguiente etapa, un practicante competente aprende a ponerse objetivos y percibir la situación actual en términos de que es lo relevante para lograr el objetivo. Finalmente, con más experiencia, alcanza el nivel donde percibe inmediatamente lo que se debe hacer. Veamos estas etapas de la adquisición de habilidades (Dreyfus, 1987)
Principiante:
Generalmente en esta etapa el instructor descompone la tarea en partes libres de contexto, para que el principiante pueda reconocerlas, y se le brindan las reglas que permiten interactuar sobre dichas partes. Utilicemos dos ejemplos:
Un aprendiz de conductor empieza a conocer ciertas partes de la conducción de un automóvil libres de interpretación, como la velocidad, exclusivamente mirando el velocímetro y se le dan reglas específicas de cuando pasar de marcha (al llegar a tal velocidad, pasar de primera a segunda, etc.).
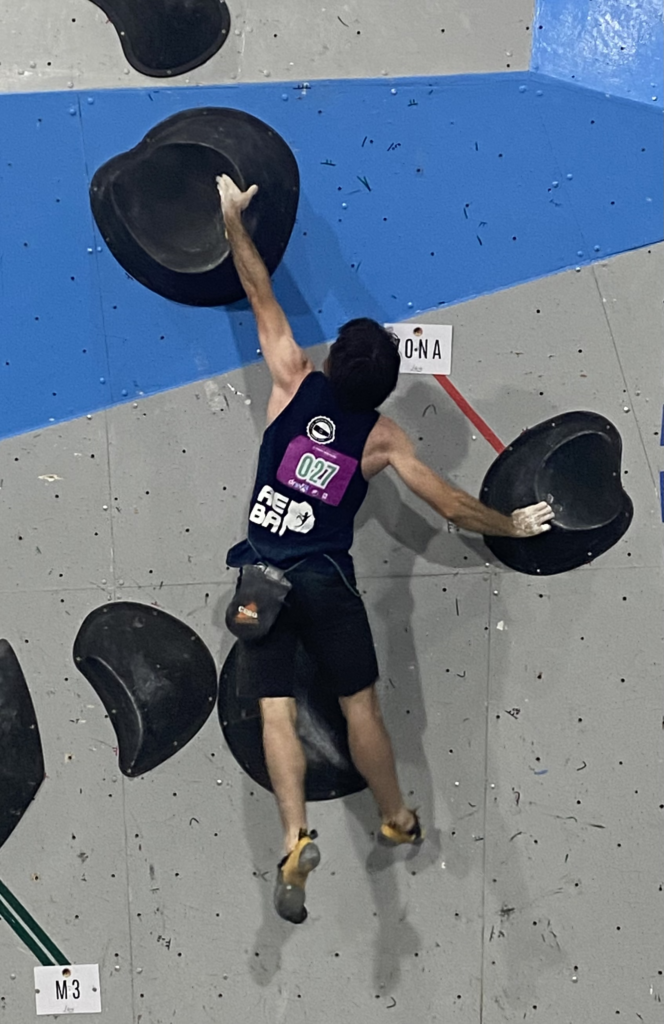
En el caso de la escalada, en el primer contacto con una subida se le instruye al escalador principiante a subir siguiendo algunas reglas muy simples como mantener el centro de gravedad cerca de la pared para descargar el peso sobre los apoyos de los pies, tratando en todo momento de no perder el equilibrio
Principiante avanzado:
A medida que el principiante va ganando experiencia, empieza a notar situaciones específicas que son diferentes a las aprendido. Luego de un número suficiente de ejemplos, el alumno puede reconocer estos nuevos aspectos, y de allí surgirán nuevas reglas de instrucción para sobrellevar la tarea.

El conductor en esta etapa podrá delimitar su accionar a través del ruido que produce el motor (algo particular) , o al visualizar la velocidad en el velocímetro. Así aprende una nueva regla, cuando el motor suene como si estuviese corriendo, subir un cambio y bajarlo cuando se lo escuche como ahogado… Describir el sonido del motor con palabras es muy difícil, y es muy particular de cada vehículo, de modo que las palabras no pueden sustituir unos cuantos ejemplos para aprender dichas reglas.
En el caso del escalador, comienza a notar que existen diferentes variaciones en la inclinación de las paredes, en las cuales acercar el centro de gravedad no será la mejor opción, ya que forzará a un excesivo trabajo de brazos para dicha tarea. Para ello deberá regular la posición del centro de gravedad en base a como sea la inclinación de la pared en cada situación particular y a veces utilizar movimientos con pérdida de equilibrio (momentum) para alcanzar ciertos agarres
Competencia:
Con el tiempo y la práctica , el número de estímulos potencialmente relevante que el alumno es capaz de reconocer se vuelve muy grande, y se hace difícil discriminar cuales son los que realmente importan. Aquí el rendimiento se difícil y agotador. Para lidiar con esto, es conveniente generar un plan de acción, que permita discriminar qué elementos de la situación deberánn ser tenidos en cuenta y cuales no. Esta atención selectiva facilita la toma de decisiones. El practicante busca nuevas reglas de manera consciente para decidir cuál será su forma de resolver la tarea. El problema radica en que hay simplemente demasiadas situaciones que difieren entre si de modos sutiles. Es por eso que los practicantes en esta etapa deben decidir por sí solos que plan seguir sin tener la seguridad de que sea apropiada su elección. Enfrentarse a esta situación de decidir con posibilidad de fallar y ser responsable del error genera un estrés emocional muy grande.
El conductor que debe tomar una salida de una autopista en una curva, luego de tener en cuenta la velocidad, las condiciones del asfalto, los otros automóviles, etc, puede percibir que está conduciendo demasiado rápido. En ese momento tiene que decidir entre reducir la presión del acelerador, sacar el pie completamente o apretar el freno, en un momento preciso. Sin dudas será un éxito si logra tomar la salida sin que le toquen bocina y sentirá estrés si comienza a patinar.
El escalador al enfrentarse a una ruta de escalada deberá ir ubicando su centro de gravedad en relación con los apoyos existentes. En el caso de una pared desplomada donde el movimiento para alcanzar la siguiente presa sea bastante amplio , deberá decidir si utiliza un bloqueo estático o realizar un movimiento dinámico con pérdida de equilibrio. Si consigue alcanzar la presa sin caerse, sentirá alivio y confiado para continuar. Los planes exitosos inducen euforia, mientras que los errores se sienten en la boca del estómago.
A medida que el alumno está en esta etapa, se va involucrando emocionalmente en las tareas, impidiéndole ubicarse en una posición racional frente a la tarea. Mientras que podía parecer que este involucramiento emocional interfiere con el examen distante de las reglas y que se inhibe así el desarrollo de las habilidades, de hecho, parece ser justo lo contrario. Si la posición distante se ve reemplazada por involucramiento, uno esta preparado para ulteriores avances
Destreza:
Las experiencias positivas y negativas fortalecerán las respuestas exitosas e inhibirán las no exitosas. La reglas y principios se verán reemplazados por discriminaciones del ambiente en ese preciso momento, acompañados de respuestas acordes para sobrellevar la tarea. La destreza parece desarrollarse solo si la experiencia es asimilada de este modo no teorético y el comportamiento intuitivo reemplaza a las respuestas razonadas.
A medida que se adquiere la capacidad de discriminar entre una variedad de situaciones, surgen nuevos planes adecuados de acción y se comienzan a tomar en cuenta ciertos aspectos del entorno, sin necesidad de tomar distancia. La acción se vuelve más fácil y menos tensa. El ejecutor diestro, experimentado e involucrado, ve metas y aspectos que destacan, pero no que hacer para lograr dichas metas. Luego de ver las metas y los rasgos relevantes, el ejecutor debe decidir qué hacer, y para ello vuelve a seguir las reglas.
En el caso del conductor que se aproxima a una curva en un día lluvioso, debe decidir si hay que pisar el freno, o solo quitar presión al acelerador. Puede perder tiempo mientras calcula según las reglas aprendidas, pero con seguridad el conductor diestro tendrá mayor posibilidades de afrontar la curva que aquel que gasta su tiempo realizando los cálculos.
Para el escalador diestro sobrellevar los diferentes estilos de movimientos que una ruta o una secuencia de bloques variados nos propone implica administrar el tiempo de decisión para lograr una eficiencia optima y no acumular fatiga, para llegar a la cima. Cuanto más rápida sea esa toma de decisiones en cada una de las situaciones que nos presenta la ruta, más chances de éxito tendremos, ya sea por encadenar o por evitar fatiga excesiva para seguir con más escaladas.
Experto:
El ejecutor diestro, ve lo que debe llevarse a cabo, pero debe decidir como hacerlo, en cambio, el ejecutor experto no solamente ve lo que necesita lograr, gracias a su vasto repertorio de discriminaciones, también ve cómo lograr la meta. La habilidad de hacer discriminaciones más sutiles y refinadas es lo que distingue a estos dos ejecutores. El experto ha aprendido a discriminar sutiles diferencias en las situaciones, que el diestro considera como similares. El experto descompone gradualmente esta clase de situaciones en subclases, cada una de las cuales comparten la misma acción, lo que posibilita la respuesta inmediata, situacional e intuitiva.
El conducir un automóvil involucra la habilidad de discriminar una enorme cantidad de situaciones. El conductor experto no solo sabe cuándo se debe bajar la velocidad en una salida de una autopista, sino que simplemente lo hace. Lo que ha de hacerse, ha de hacerse.
En este nivel, el escalador a partir del reconocimiento inmediato del recorrido a medida que va escalando, ubica su cuerpo en relación con los apoyos y al próximo movimiento a realizar, independientemente de la lectura previa y el plan de acción que haya prefijado, los movimientos los ejecuta sin tener que hacerlos conscientes. Simplemente los ejecuta.
Tomando los niveles jerárquicos de construcción de las habilidades motoras de Bernstein (Profeta y Turvey, 2018) y siguiendo este modelo propuesto por Dreyfus, podemos analizar cómo y por qué se llega a este último nivel experto en el aprendizaje
El primer nivel es el del tono, que establece la comunicación entre el sistema neuronal y el motor. Su función principal es el de preparar el aparato locomotor para ejecutar las ordenes de los niveles siguientes.
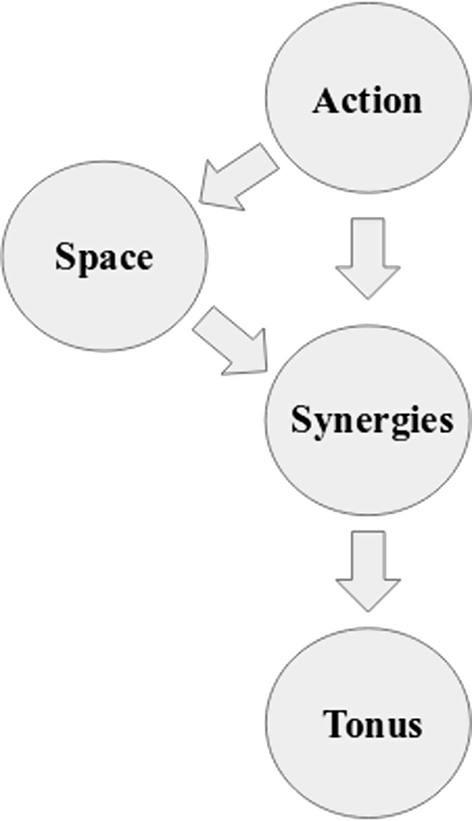
El segundo nivel es el de las sinergias, el cual condiciona los grados de Libertad del aparato locomotor y garantiza la coherencia en el movimiento al controlar los grupos musculares. Las sinergias están marcadas por el flujo de información propioceptiva de todo el cuerpo. Su función es corregir los detalles del movimiento.
El tercer nivel es el del espacio, que se refiere a cómo uno realiza un movimiento dirigido a un objetivo (goal-directed). Tiene influencia de los sentidos (oído, olfato, tacto , vista) que son estimulados por el ambiente, entretejiendo las diferentes fuentes sensitivas y las experiencias pasadas. Tiene una doble función, por un lado, la percepción objetiva de las relaciones entre el cuerpo y el ambiente y por el otro la habilidad de utilizar este espacio externo.
El cuarto y último nivel es el de las acciones , que es el responsable de controlar las secuencias de movimientos, es decir ordenar los elementos en una secuencia para cumplir un objetivo. Debido a los grados de libertad de cada movimiento individual, diferentes elementos pueden ser organizados de diferente forma para cumplir la misma tarea, lo cual le asegura flexibilidad y variabilidad al sistema
Según Bernstein (1996), casi todos los movimientos humanos se basan en varios de estos niveles; del cual uno de ellos juega un papel principal, mientras que los otros niveles tienen un papel secundario y que prestan un apoyo necesario, que normalmente no se percibe conscientemente. Cuando el sapo le pregunto al ciempiés, éste fijo su atención en los detalles del movimiento de sus patas y trató conscientemente de controlar sus automatismos de un nivel inferior. Uno tiene que confiar en el nivel muscular y articular (nivel de las sinergias) la mayoría del tiempo. Durante las ultimas etapas del desarrollo de las habilidades, para llegar a convertirse en un experto, la atención debe estar en el nivel donde reside la consciencia. Uno se debe concentrar en el deseo de resolver el problema motor lo más preciso y expeditivamente posible. Este deseo llevará a correcciones significativas del movimiento en su totalidad.
¨…similar a como el cerebro refleja el mundo externo actual, la situación presente y las experiencias pasadas impresas en la memoria, tienen la habilidad en cierto grado de reflejar la situación de un futuro previsible que aún no se ha convertido en realidad y que se persigue impulsado por necesidades biológicas. Solo esa imagen asimilada del futuro deseado puede servir como fundamento para diseñar la tarea y programar su solución.¨ (Bernstein, 1996)
De aquí el concepto de modelo del futuro deseado expresado por Bernstein, el mismo precede a la acción y predetermina y dirige la acción subsiguiente. Los movimientos son programados y conducidos en un ambiente dinámico y cambiante. El resultado del movimiento o la acción depende no solo de los comandos que dirigen la acción, sino también de los eventos que suceden en el ambiente y las fuerzas que emergen en su interacción (Feigenberg, 2004). Pensar que el aprendizaje de una habilidad motora consiste en la transmisión exclusiva de reglas sin tener en cuenta que estamos insertos en un mundo, con infinitas posibilidades de acción es retrotraernos a la idea cartesiana y atomista que sin dudas retrasará el proceso para llegar a ser experto .

Referencias:
Bernstein, N. A. (1996). Dexterity and its development. (M. L. Latash & M. T. Turvey, Eds.). Lawrence Erlbaum Associates, Inc.
Dreyfus, H. L. (1987). From Socrates to Expert Systems: The Limits of Calculative Rationality. Bulletin of the American Academy of Arts and Sciences, 40(4), 15–31.
Feigenberg, J.M. (2014). Nikolai Bernstein – from Reflex to the Model of the Future. LIT Verlag Münster
Humphrey, G. (1923). The story of man’s mind. Small, Maynard: Boston.
Popper, K. R. (1997). El cuerpo y la mente: escritos inéditos acerca del conocimiento y el problema cuerpo-mente. Grupo Planeta (GBS)
Profeta, V. L. S., & Turvey, M. T. (2018). Bernstein’s levels of movement construction: A contemporary perspective. Human movement science, 57, 111–133.
Deja un comentario