Hans Moravec, a great robotics researcher, formulated (together with Rodney Brooks and Marvin Minsky) this paradox that bears his name:
“It is easy to get computers to show capabilities similar to those of an adult human on an intelligence test or when playing checkers, and very difficult to get them to acquire the perceptual and motor skills of a one-year-old baby.”
Marvin Minsky, one of the fathers of computer science and co-founder of the MIT artificial intelligence laboratory writes in his book Society of Mind (1986) that the entire set of low-level processes in a human is highly resistant to engineering. reverse, and that we are “unaware” of our best abilities. Rather, our attention is focused on simple actions that take more work, and not on complex processes that develop naturally.
In Moravec’s own words: “Encoded into highly evolved sensory and motor portions of the human brain, there are billions of years of experience about the nature of the world and how to survive in it. The deliberate process we call reasoning is, I believe, the thinnest layer of human thought, effective only because it relies on the older and much more powerful, though usually unconscious, motor sensory knowledge. We are all prodigies in perceptual and motor areas, so good that we make the difficult look easy. Abstract thinking, however, is a new trick, perhaps less than 100,000 years old. We haven’t mastered it yet. It is not entirely inherently difficult; It only seems that way when we do it. ”
This explanation of the paradox is based on evolution since all human abilities are implemented biologically, using machinery designed by the process of natural selection. In the course of its evolution, natural selection has tended to preserve those improvements in design and optimizations. The older a skill, the longer natural selection has had to improve the design.
By design in the process of evolution I mean what Daniel Dennet (2015) mentions in his book Intuition Bombs…: ¨Science has discovered that design without a designer (without a designer with a mind, foresight and intention) not only it is possible, but it is everywhere¨

The idea of highly evolved abilities in the human being can be found in the writings of N. Bernstein (1996) on the problem of the degrees of freedom of the movement control. He demonstrated how rich the motor system is in degrees of freedom compared to the most sophisticated devices and machines of the time, and also demonstrated that including an additional degree of freedom in a chain of motion introduces an infinite number of choices to perform a particular movement.
M. Latash (1996) emphasizes the choice in each of human actions. There are infinite possibilities to carry out any movement, and to that we must add the intention and the interaction with the environment. Imagine that you are standing on a wheeled platform holding a cup with play dough. The platform begins to move, and immediately there are postural adjustments of the body and the arm that holds the cup, some of those adjustments are very fast, which basically does not give you time to think about the pertinent corrections. Now imagine that instead of having play dough, the cup is filled with hot coffee. In the first example, the intention would be not to fall, and in the second, not to tip / brown would become comparably more important than not to fall.
Definitely the abundance of degrees of freedom is an advantage for the nervous systems of mammals. The human body has redundant degrees of freedom, both anatomical (muscles and joints), kinematic (movements can have different trajectories, speeds and accelerations and yet achieve the same goal) and neurophysiological (multiple motor neurons that synapse on the same muscle, and vice versa).
The problem posed by Bernstein results from infinite redundancy, but from variability between movements; therefore, the nervous system apparently must choose a particular motor solution each time it acts constantly correcting.
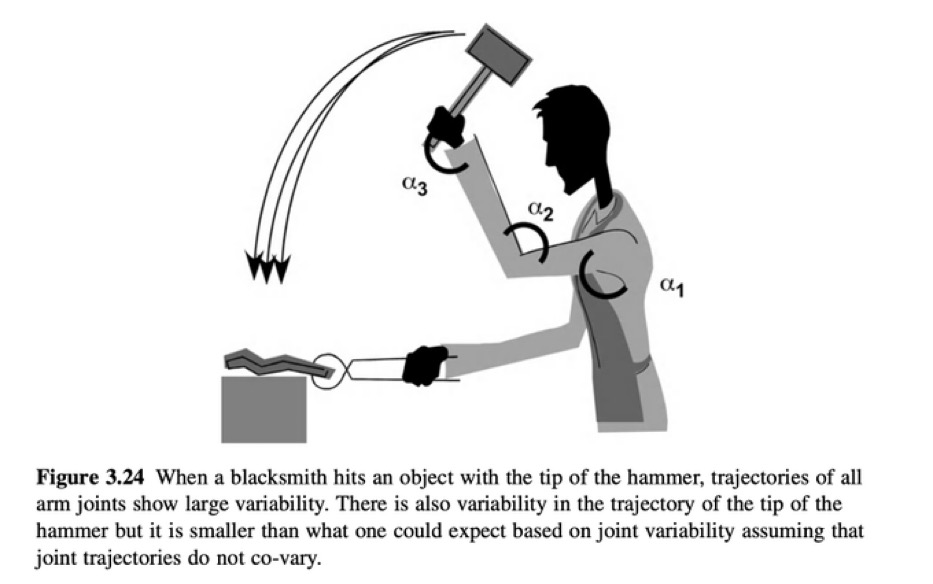
A classic Bernstein experiment consisted of analyzing through a high-speed photography system (a technology invented by him in the first decades of 1900) expert blacksmiths, who made blows with a hammer to an anvil thousands of times a day, 6 days a week for years, the best blacksmiths in Russia. They probably have the best technique with an optimal pattern to hit and develop that work. Bernstein inferred that replication of this hypothetical motor program would lead to a highly reproducible hammer trajectory, but nevertheless the trajectories of individual joints were constantly varied to accomplish the same task: for the hammer to strike accurately. If one joint deviated, apparently other joints compensated for the error, hence the famous phrase: repetition without repetition, that is, repetitive solutions of the task with variable means.
The central nervous system has the option of solving the task differently each time, this choice is reflected in the variability of the trajectories and the possibility of solving the same task when conditions change. Let’s imagine a basketball player, whose task is to shoot the basket; every time he performs the skill, he does it from different situations (closer or further from the basket, in instability, with an opponent’s disturbance, etc.) but the result is the same.
To achieve a certain goal, there are an infinite number of possibilities, considering that in addition to having redundant muscles and joints, muscles can span multiple joints, which further complicates the system. The properties of the muscle change as the length of the muscle changes, the tendons in turn are a passive structure with elastic characteristics that depends on the force exerted on them, complicating things even more. Individual muscles are innervated by multiple nerve fibers (motor units), and the way in which these units are recruited is equally complex. Although it is generally understood that each joint has an agonist-antagonist pair, not all joint movements are controlled locally. Finally, the kinematics of the movement are not identical even when the same movement is performed repeatedly; natural variation in limb position, velocity, and acceleration occur even during apparently identical movements.
While Bernstein posits that motor redundancy is a problem, over the past ten years dozens of publications have provided support for the view that there is no motor redundancy problem, instead there is the bliss of motor abundance (no redundancy) (Latash, 2012). Recent developments of the abundance principle have led to the idea of synergies as neural organizations that ensure task-specific variation of elemental variables that provide the desired stability properties of performance. Muscle synergies have been proposed to arise from an interplay between the limitations and properties of the nervous and musculoskeletal systems.

When analyzing motor learning, Bernstein proposes three stages (Turvey, 1996):
- Freeze the degrees of freedom of the system, using coordinating solutions that limit the degrees of freedom of the periphery as much as possible, allowing to coordinate and control a smaller number of biomechanical degrees of freedom
- Liberation of the degrees of freedom, which will eventually incorporate them into the coordinated resolution of skill performance.
- Use reactive phenomena, where the system uses the phenomena that arise from the interaction of the organism with the environment, such as the coordination of the different torques of the different joints

Reproducing tasks that from an external perspective seem simple, although when analyzing them they do not resist the use of reverse engineering, especially due to the ability to adapt to environmental conditions, with sufficient variability to perform the task in changing conditions and with constant disturbances that stresses the feedback and control systems, is a very complex task for the human being, and even more so for a machine. In other words: trust a machine to play chess … but when the game is over, ask a human to take care of storing the pieces in their box.

Referencess:
Bernstein, N. A. (1996). Resources for ecological psychology. Dexterity and its development. (M. L. Latash & M. T. Turvey, Eds.). Lawrence Erlbaum Associates, Inc.
Davids, K., Button, C., & Bennett, S. (2008). Dynamics of skill acquisition: A constraints-led approach. Human Kinetics
Dennett, DC (2015). Bombas de intuición y otras herramientas del pensamiento. Ed. Fondo de Cultura Económica. Mexico, D.F.
Latash, ML (2012). Fundamentals of motor control. Academic Presss.
Latash, ML (1996). The Bernstein Problem. In Latash ML, Turvey MT, editors. Dexterity and its Development. New Jersey: Psychology Press; 1996. p. 277-303.
Latash M. L. (2012). The bliss (not the problem) of motor abundance (not redundancy). Experimental brain research, 217(1), 1–5.
Latash, ML (2008). Sinergy. Oxford University Press
Minsky, M. (1986). The Society of Mind. New York: Simon & Schuster.
Moravec H. (1988). Mind children: the future of robot and human intelligence. Harvard University. United States
Newell KM. (1996). Change in movement and skill: Learning, retention, and transfer. In: Latash
ML, Turvey MT, editors. Dexterity and its Development. New Jersey: Psychology Press;
1996. p. 393-429.
Leave a Reply