A centipede was happy – quite!
Until a toad in fun
Said,¨Pray, which leg moves after which?¨
This raised her doubts to such pitch,
She fell exhausted in the ditch
Not knowing how to run.
Who hasn’t experienced the same thing that happened to the centipede? When we start to consciously analyze a task, uncertainty wins the game. Even the simplest activities can become almost impossible. The centipede dilemma poem, attributed to Katherine Craster (1841–1874), was popularized by psychologist George Humphrey. In his book The Story of Man’s Mind (1923) he emphasizes that “No man skilled in a trade need pay constant attention to routine work, and if he does, the task will be spoiled.” Precisely Humphrey’s law says: conscious attention to a task normally carried out automatically impairs its performance.
Many times this law has been linked to what is called paralysis by analysis, that is, to stop acting in situations in which we have to make important decisions due to an excess of reflective thoughts, collecting so much information on the subject that excessive analysis complicates the decision. decision-making due to the cognitive effort required, although this view is generally more closely linked to decision-making theory and procrastination.
Karl Popper (1997) also makes reference to the dilemma of the centipede, although instead of a toad the speaker is a spider. Beyond the fable, the philosopher tells an anecdote about the violinist Adolph Busch who on one occasion at the end of a concert, a colleague asked him how he interpreted a certain passage. Busch said it was pretty straightforward, and then he realized he couldn’t play it anymore. The attempt to interpret it consciously affected his fingering and he was no longer able to do so.
To explain this situation, he uses the concept of the level of conscious control. If an action or ability falls below that level, simply following it consciously causes interference until it comes to a complete stop. Conscious control is the highest control, while all other controls have sunk into the subconscious and unconscious. Only the highest control remains a fully conscious action, so that we know what we are doing.
Now, the question is how to get to this situation, where an expert cannot determine the rules of his actions, however simple the task may be. An apprentice calculates using rules and facts, but with talent and experience he becomes an expert who intuitively sees what to do without resorting to rules. When you ask for the rules you’re using, you’re being pushed back to the beginner level; instead of using rules that he no longer remembers, he is forced to remember rules that he no longer uses. No set of rules or facts can capture the knowledge that an expert has when he has stored his experience of effective results from tens of thousands of situations (Dreyfus, 1979).
Alan Turing suggested that a digital computer programmed with rules and facts could exhibit intelligent behavior, thus artificial intelligence was born in the middle of the last century. In the origins of the so-called GOFAI (Good Old Fashioned Artificial Intelligence), researchers tried to produce expert machines that follow the rules used by expert teachers. These machines, even being faster than people to apply the rules, do not reach the performance of humans.
The main problem is that it is generally understood that learning starts from particular cases and from there more general heuristic rules are abstracted that allow them to be used in any situation, but it seems that the acquisition of skills moves in the opposite way, from abstract rules. to particular cases (Dreyfus, 1987).
When an adult learns a particular skill, it usually begins by applying rules out of context (information processing theory). Thus a beginner learns to follow certain strict rules of the activity. However, once you start to understand the features, you start to see significant aspects, but those are context-free. In the next stage, a competent practitioner learns to set goals and perceive the current situation in terms of what is relevant to achieving the goal. Eventually, with more experience, he reaches the level where he immediately perceives what must be done. Let’s look at these stages of skill acquisition (Dreyfus, 1987)
Beginner:
Generally, at this stage, the instructor breaks down the task into context-free parts, so that the beginner can recognize them, and the rules that allow interaction on these parts are provided. Let’s use two examples:
An apprentice driver begins to learn certain interpretation-free parts of driving a car, such as speed, exclusively by looking at the speedometer and is given specific rules on when to shift (when reaching that speed, shift from first to second gear).
In the case of climbing, in the first contact with a climb, the beginner climber is instructed to climb following some very simple rules such as keeping the center of gravity close to the wall to unload the weight on the foot supports, trying in at all times not to lose balance
Advanced Beginner:
As the beginner gains experience, he begins to notice specific situations that are different from what he has learned. After a sufficient number of examples, the student can recognize these new aspects, and from there, new instructional rules will emerge to cope with the task.

The driver at this stage will be able to limit his actions through the noise produced by the engine (something particular), or by viewing the speed on the speedometer. This is how you learn a new rule, when the engine sounds like it is running, shift up a gear and downshift when you hear it choking… Describing the sound of the engine in words is very difficult, and it is very particular to each vehicle, so the words cannot replace a few examples to learn these rules.
In the case of the climber, he begins to notice that there are different variations in the inclination of the walls, in which bringing the center of gravity closer will not be the best option, since it will force excessive arm work . To do this, you must regulate the position of the center of gravity based on the inclination of the wall in each particular situation and sometimes use movements with loss of balance (momentum) to achieve certain holds.
Competence:
With time and practice, the number of potentially relevant stimuli that the student is able to recognize becomes very large, and it becomes difficult to discriminate which are the ones that really matter. Here performance is difficult and exhausting. To deal with this, it is convenient to generate an action plan, which allows discriminating which elements of the situation should be taken into account and which not. This selective attention facilitates decision making. The practitioner consciously searches for new rules to decide what his way of solving the task will be. The problem is that there are simply too many situations that differ from each other in subtle ways. That is why practitioners at this stage must decide for themselves which plan to follow without being sure that their choice is appropriate. Facing this situation of deciding with the possibility of failing and being responsible for the error generates great emotional stress.
The driver who must exit a highway in a curve, after taking into account speed, road conditions, other cars, etc., may perceive that he is driving too fast. At that moment you have to decide between reducing the pressure on the accelerator, removing your foot completely or pressing the brake, at a precise moment. You will undoubtedly be a success if you manage to make the start without being honked at and you will feel stress if you start to skid.
When facing a climbing route, the climber must locate his center of gravity in relation to the existing supports. In the case of an overhang wall where the movement to be made is wide enough to reach the next hold, you will have to decide whether to use a static lock off or perform a dynamic movement with loss of balance. If you manage to reach the prey without falling, you will feel relieved and confident to continue. Successful plans induce euphoria, while failures feel in the pit of your stomach.
As the student is in this stage, he becomes emotionally involved in the tasks, preventing him from being in a rational position regarding the task. While it may appear that this emotional involvement interferes with distant examination of the rules and thus inhibits the development of skills, in fact it appears to be just the opposite.
Skill:
Positive and negative experiences will strengthen successful responses and inhibit unsuccessful ones. The rules and principles will be replaced by discriminations of the environment at that precise moment, accompanied by appropriate responses to cope with the task. Skill seems to develop only if experience is assimilated in this non-theoretical way and intuitive behavior replaces reasoned responses.
As the ability to discriminate between a variety of situations is acquired, new appropriate action plans emerge and certain aspects of the environment begin to be taken into account. The action becomes easier and less tense. The skilled, experienced, and involved executor sees goals and highlights, but not what to do to achieve those goals. After looking at the relevant goals and traits, the performer must decide what to do by following the rules again.
For the driver approaching a curve on a rainy day, he must decide whether to hit the brake, or just ease off the accelerator. You can waste time while calculating according to the learned rules, but surely the skilled driver will have a better chance of facing the curve than the one who spends his time doing the calculations.

For the skilled climber, coping with the different movement styles that a route or a sequence of varied boulders proposes implies managing the decision time to achieve optimal efficiency and not accumulate fatigue, to reach the top. The faster that decision-making is in each of the situations that the route presents us with, the more chances of success we will have, either by chaining or by avoiding excessive fatigue to continue with more climbs.
Expert:
The skilful executor sees what must be done, but must decide how to do it, on the other hand, the expert executor not only sees what he needs to achieve, thanks to his vast repertoire of discriminations, he also sees how to achieve the goal. The ability to make more subtle and refined discriminations is what sets these two enforcers apart. The expert has learned to discriminate subtle differences in situations, which the right-hander considers similar. The expert gradually breaks down this class of situations into subclasses, each of which share the same action, thus enabling immediate, situational, and intuitive response.
Driving a car involves the ability to discriminate a huge number of situations. The skilled driver not only knows when to slow down on a freeway exit, but simply does it. What has to be done, has to be done.
At this level, the climber, based on the immediate recognition of the route as he climbs, locates his body in relation to the holds and the next movement to be carried out, regardless of the previous reading and the action plan that he has predetermined, the movements it executes them without having to make them aware.
Taking Bernstein’s hierarchical levels of construction of motor skills (Profeta & Turvey, 2018) and following this model proposed by Dreyfus, we can analyze how and why this last expert level in learning is reached.
The first level is that of tone, which establishes communication between the neuronal and motor systems. Its main function is to prepare the locomotor system to execute the orders of the following levels.
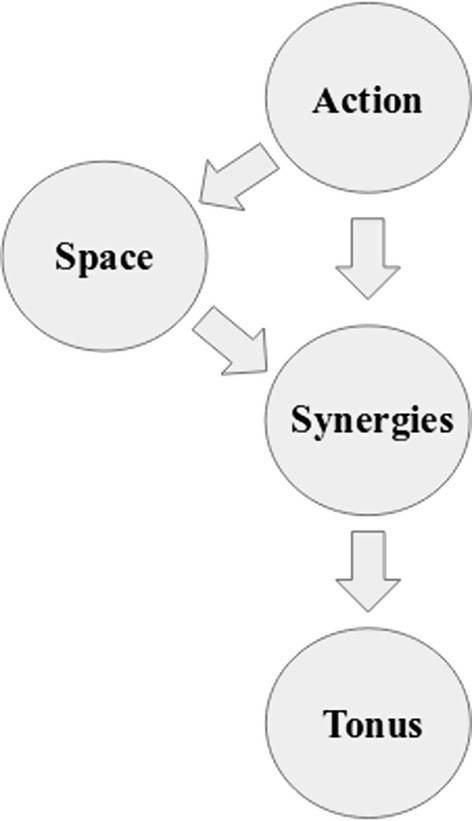
The second level is that of synergies, which determines the degrees of freedom of the locomotor system and guarantees coherence in movement by controlling muscle groups. Synergies are marked by the flow of proprioceptive information throughout the body. Its function is to correct the details of the movement.
The third level is that of space, which refers to how one performs a goal-directed movement. It is influenced by the senses (hearing, smell, touch, sight) that are stimulated by the environment, interweaving the different sensitive sources and past experiences. It has a double function, on the one hand, the objective perception of the relationships between the body and the environment, and on the other, the ability to use this external space.
The fourth and last level is that of actions, which is responsible for controlling the sequences of movements, that is, ordering the elements in a sequence to achieve an objective. Due to the degrees of freedom of each individual movement, different elements can be organized in different ways to fulfill the same task, which ensures flexibility and variability to the system.
According to Bernstein (1996), almost all human movements are based on several of these levels; of which one of them plays a main role, while the other levels have a secondary role and provide necessary support, which is not normally consciously perceived. When the toad asked the centipede, the centipede fixed its attention on the details of the movement of its legs and consciously tried to control its lower-level automatisms. One has to rely on the muscle and joint level (level of synergies) most of the time. During the later stages of skill development, in order to become an expert, attention must be at the level where consciousness resides. One must concentrate on the desire to solve the motor problem as accurately and expeditiously as possible. This desire will lead to significant corrections of the movement as a whole.
“Similar to how the brain reflects the current external world, the present situation and past experiences imprinted in memory have the ability to some degree to reflect the foreseeable future situation that has not yet become a reality and is pursued.” driven by biological needs. Only that assimilated image of the desired future can serve as a foundation for designing the task and programming its solution¨ (Bernstein, 1996).
Bernstein’s model concept of the desired future precedes action and predetermines and directs subsequent action. The movements are programmed and conducted in a dynamic and changing environment. The result of the movement or action depends not only on the commands that direct the action, but also on the events that happen in the environment and the forces that emerge in their interaction (Feigenberg, 2004). To think that the learning of a motor skill consists of the exclusive transmission of simple rules without taking into account that we are inserted in a world, with infinite possibilities of action, is to go back to the Cartesian and atomistic idea that will undoubtedly delay the process to become expert.

References:
Bernstein, N. A. (1996). Dexterity and its development. (M. L. Latash & M. T. Turvey, Eds.). Lawrence Erlbaum Associates, Inc.
Dreyfus, H. L. (1987). From Socrates to Expert Systems: The Limits of Calculative Rationality. Bulletin of the American Academy of Arts and Sciences, 40(4), 15–31.
Feigenberg, J.M. (2014). Nikolai Bernstein – from Reflex to the Model of the Future. LIT Verlag Münster
Humphrey, G. (1923). The story of man’s mind. Small, Maynard: Boston.
Popper, K. R. (1997). El cuerpo y la mente: escritos inéditos acerca del conocimiento y el problema cuerpo-mente. Grupo Planeta (GBS)
Profeta, V. L. S., & Turvey, M. T. (2018). Bernstein’s levels of movement construction: A contemporary perspective. Human movement science, 57, 111–133.
Leave a Reply