
Hans Moravec, un gran investigador en robótica, formuló (junto a Rodney Brooks y Marvin Minsky) esta paradoja que lleva su nombre:
“Es relativamente fácil conseguir que las computadoras muestren capacidades similares a las de un humano adulto en un test de inteligencia o a la hora de jugar a las damas, y muy difícil lograr que adquieran las habilidades perceptivas y motoras de un bebé de un año”.
Marvin Minsky, uno de los padres de las ciencias de la computación y cofundador del laboratorio de inteligencia artificial del MIT escribe en su libro Society of Mind (1986) que todo el conjunto de procesos de bajo nivel en un humano es muy resistente a la ingeniería inversa, y que «no somos conscientes» de nuestras mejores habilidades. Por el contrario, nuestra atención se enfoca en acciones simples que toman más trabajo, y no en los procesos complejos que se desarrollan de forma natural.
En plalabras del propio Moravec: ¨Codificada en porciones sensoriales y motoras altamente evolucionadas del cerebro humano, hay mil millones de años de experiencia sobre la naturaleza del mundo y cómo sobrevivir en él. El deliberado proceso al que llamamos razonamiento es, creo, la capa más delgada del pensamiento humano, eficaz sólo porque se apoya en el más antiguo y mucho más potente, aunque por lo general inconsciente, conocimiento sensorial motor. Todos somos prodigios en áreas perceptivas y motoras, tan buenos que hacemos ver fácil lo difícil. El pensamiento abstracto, sin embargo, es un truco nuevo, quizás con menos de 100 mil años de antigüedad. Todavía no lo hemos dominado. No es del todo intrínsecamente difícil; sólo parece así cuando lo realizamos.¨
Esta explicación de la paradoja se basa en la evolución ya que todas las habilidades humanas se implementan biológicamente, utilizando maquinaria diseñada por el proceso de la selección natural. En el curso de su evolución, la selección natural ha tendido a preservar aquellas mejoras en el diseño y optimizaciones. Mientras más antigua es una habilidad, más tiempo ha tenido la selección natural para mejorar el diseño.
Por diseño en el proceso de la evolución me refiero a lo que Daniel Dennet (2015) menciona en su libro Bombas de Intuición… : ¨la ciencia ha descubierto que el diseño sin diseñador (sin un diseñador con una mente, previsión e intención) no solo es posible, sino que esta en todas partes¨

La idea de habilidades altamente evolucionadas en el ser humano, puede encontrarse en los escritos de N. Bernstein (1996) sobre el problema de los grados de libertad del control de los movimientos. El demostró cuán rico es el sistema motor en grados de libertad comparado con los dispositivos y maquinas mas sofisticadas de la época (mediados del siglo pasado), ademas demostró que incluir un grado de libertad adicional en una cadena de movimiento introduce un infinito numero de elecciones para realizar un movimiento en particular.
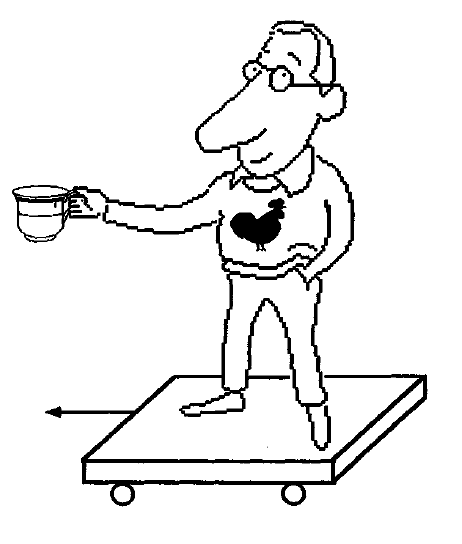
M. Latash (1996) hace hincapié en la elección en cada una de las acciones humanas. Hay infinitas posibilidades para realizar cualquier movimiento, y a eso hay que agregarle la intención y la interacción con el medio. Imaginen que están parados sobre una plataforma con ruedas sosteniendo una tasa con gelatina. La plataforma se comienza a mover, e inmediatamente hay ajustes posturales del cuerpo y del brazo que sostiene la taza, algunos de esos ajustes son muy rápidos, que básicamente no le dan tiempo para pensar en las correcciones pertinentes. Ahora imagine que en vez de tener gelatina, la taza está llena de café caliente. En el primer ejemplo, la intención seria no caer, y en el segundo, no volcar/se café se volvería comparablemente mas importante que no caer.
Definitivamente la abundancia de grados de libertad es una ventaja para los sistemas nerviosos de mamíferos. El cuerpo humano tiene grados de libertad reduntantes, tanto anatómicos (músculos y articulaciones), cinemáticos (los movimientos pueden tener diferentes trayectorias, velocidades y aceleraciones y, sin embargo, lograr el mismo objetivo) y neurofisiológicos (múltiples motoneuronas que hacen sinapsis en el mismo músculo, y viceversa).
El problema que plantea Bernstein resulta de una redundancia infinita, pero de variabilidad entre los movimientos; por lo tanto, el sistema nervioso aparentemente debe elegir una solución motora particular cada vez que actúa corrigiendo constantemente.
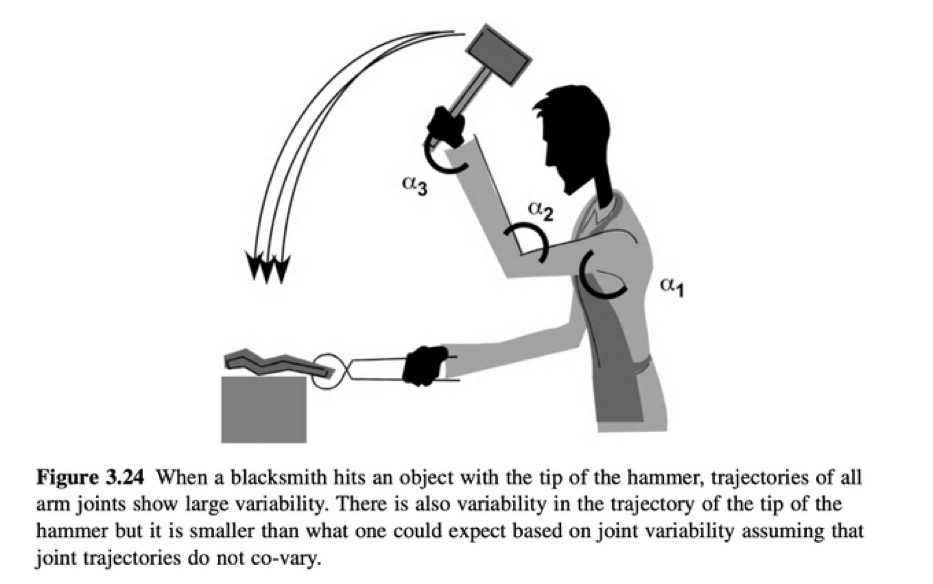
Un experimento clásico de Bernstein consistió en analizar a través de un sistema de fotografía de alta velocidad (tecnología inventada por él en las primeras décadas de 1900) a herreros expertos, que realizaban golpes con un martillo a un yunque miles de veces al día, 6 días a la semana por años, los mejores herreros de Rusia. Probablemente tengan la mejor técnica con un patron optimo para golpear y desarrollar esa labor. Bernstein infirió que la reproducción de este hipotético programa motor llevaría a una trayectoria altamente reproducible del martillo, pero sin embargo las trayectorias de las articulaciones individuales variaban constantemente para conseguir la misma tarea: que el martillo golpeara con precision. Si una articulación se desviaba, aparentemente otras articulaciones compensaban el error, de aquí surge la famosa frase: repetición sin repetición, es decir, soluciones repetitivas de la tarea con medios variables.
El sistema nervioso central tiene la opción de resolver la tarea de manera diferente cada vez, esta elección se refleja en la variabilidad de las trayectorias y la posibilidad de resolver la misma tarea cuando las condiciones cambian. Imaginemos un jugador de basquetbol, cuya tarea es encestar al aro; cada vez que realiza el gesto lo hace desde situaciones distintas (mas cerca o más lejos del aro, en inestabilidad, con perturbación de un oponente, etc) pero el resultado es el mismo.
Para lograr determinado objetivo, existe un numero infinito de posibilidades, teniendo en cuenta que además de tener músculos y articulaciones redundantes, los músculos pueden abarcar múltiples articulaciones, lo que complica aún más el sistema. Las propiedades del músculo cambian a medida que cambia la longitud del músculo, los tendones a su vez son una estructura pasiva con características elásticas que depende de la fuerza que se ejerce sobre ellos complicando aun mas las cosas. Los músculos individuales están inervados por múltiples fibras nerviosas (unidades motoras), y la manera en que se reclutan estas unidades es igualmente compleja. Si bien se suele entender que cada articulación tiene un par agonista – antagonista , no todos los movimientos articulares se controlan localmente. Finalmente, la cinemática del movimiento no es idéntica incluso cuando se realiza el mismo movimiento repetidamente; la variación natural en la posición, la velocidad y la aceleración de la extremidad ocurren incluso durante movimientos aparentemente idénticos.
Si bien Bernstein plantea que la redundancia motora es un problema, durante los últimos diez años, decenas de publicaciones han proporcionado apoyo a la opinión de que no hay problema de redundancia motora, en lugar de eso, existe la dicha de la abundancia (no redundancia) motora (Latash, 2012). Los desarrollos recientes del principio de abundancia han llevado a la idea de sinergias como organizaciones neuronales que aseguran la variación específica de la tarea de las variables elementales que proporcionan las propiedades de estabilidad deseadas del rendimiento. Se ha propuesto que las sinergias musculares surgen de una interacción entre las limitaciones y las propiedades de los sistemas nervioso y musculoesquelético.

A la hora de analizar el aprendizaje motor, Bernstein propone tres etapas (Turvey, 1996):
1. Congelar los grados de libertad del sistema, utilizando soluciones coordinativas que limiten al máximo los grados de libertad de la periferia, permitiendo coordinar y controlar un numero menor de grados de libertad biomecánicas
2. Liberación de los grados de libertad, que eventualmente los incorporaran en la resolución coordinada del rendimiento de la habilidad
3. Utilizar los fenómenos reactivos, en donde el sistema utiliza los fenómenos que surgen de la interacción del organismo con el medio, como por ejemplo la coordinación de los diferentes torques de las diferentes articulaciones

Reproducir tareas que desde una perspectiva externa parecen sencillas, aunque a la hora de analizarlas no resisten el uso la ingeniería inversa, sobre todo por la capacidad de adaptarse a las condiciones del medio, con la variabilidad suficiente para realizar la tarea en condiciones cambiantes y con perturbaciones constantes que fuerzan los sistemas de retroalimentación y control, es una tarea muy compleja para el ser humano, y mucho mas aun para una maquina. Dicho de otro modo: confía en una máquina para jugar al ajedrez… pero cuando termine la partida pídele a un humano que se encargue él de guardar las piezas en su caja.

Referencias:
Bernstein, N. A. (1996). Resources for ecological psychology. Dexterity and its development. (M. L. Latash & M. T. Turvey, Eds.). Lawrence Erlbaum Associates, Inc.
Davids, K., Button, C., & Bennett, S. (2008). Dynamics of skill acquisition: A constraints-led approach. Human Kinetics
Dennett, DC (2015). Bombas de intuición y otras herramientas del pensamiento. Ed. Fondo de Cultura Económica. Mexico, D.F.
Latash, ML (2012). Fundamentals of motor control. Academic Presss.
Latash, ML (2008). Sinergy. Oxford University Press
Latash, ML (1996). The Bernstein Problem. In Latash ML, Turvey MT, editors. Dexterity and its Development. New Jersey: Psychology Press; 1996. p. 277-303.
Latash M. L. (2012). The bliss (not the problem) of motor abundance (not redundancy). Experimental brain research, 217(1), 1–5.
Minsky, M. (1986). The Society of Mind. New York: Simon & Schuster.
Moravec H. (1988). Mind children: the future of robot and human intelligence. Harvard University.
Newell KM. (1996). Change in movement and skill: Learning, retention, and transfer. In: Latash ML, Turvey MT, editors. Dexterity and its Development. New Jersey: Psychology Press; 1996. p. 393-429.
Deja un comentario